

Uart0 Class Reference
#include <uart0.hpp>
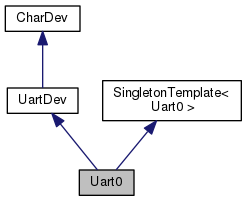
Inheritance diagram for Uart0:
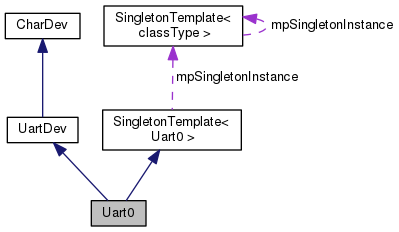
Collaboration diagram for Uart0:
Public Member Functions | |
| bool | init (unsigned int baudRate, int rxQSize=32, int txQSize=64) |
 Public Member Functions inherited from UartDev Public Member Functions inherited from UartDev | |
| void | setBaudRate (unsigned int baudRate) |
| Reset the baud-rate after UART has been initialized. More... | |
| bool | getChar (char *pInputChar, unsigned int timeout=portMAX_DELAY) |
| bool | putChar (char out, unsigned int timeout=portMAX_DELAY) |
| bool | flush (void) |
| Flushed all pending transmission of the uart queue. More... | |
| void | handleInterrupt () |
| unsigned int | getRxQueueSize () const |
| unsigned int | getTxQueueSize () const |
| unsigned int | getRxQueueWatermark () const |
| unsigned int | getTxQueueWatermark () const |
| bool | recentlyActive (unsigned int ms=3000) const |
| TickType_t | getLastActivityTime (void) const |
| void | resetActivity (void) |
| Public Member Functions inherited from CharDev | |
| bool | gets (char *pBuff, int maxLen, unsigned int timeout=0xffffffff) |
| int | printf (const char *format,...) |
| int | scanf (const char *format,...) |
| uint16_t | getPrintfMemSize (void) const |
| bool | put (const char *pString, unsigned int timeout=0xffffffff) |
| void | putline (const char *pBuff, unsigned int timeout=0xffffffff) |
| bool | isReady (void) |
| void | setReady (bool r) |
Static Public Member Functions | |
Static functions to use for printf/scanf redirection. | |
| static char | getcharIntrDriven (char unused) |
| static char | putcharIntrDriven (char thechar) |
| Static Public Member Functions inherited from SingletonTemplate< Uart0 > | |
| static Uart0 & | getInstance () |
| Public member to get instance of this SINGLETON class. More... | |
Friends | |
| class | SingletonTemplate< Uart0 > |
| Friend class used for Singleton Template. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from UartDev | |
| bool | init (unsigned int pclk, unsigned int baudRate, int rxQSize=32, int txQSize=32) |
| UartDev (unsigned int *pUARTBaseAddr) | |
| ~UartDev () | |
| Protected Member Functions inherited from CharDev | |
| CharDev () | |
| virtual | ~CharDev () |
| Protected Member Functions inherited from SingletonTemplate< Uart0 > | |
| SingletonTemplate () | |
| Static Protected Attributes inherited from SingletonTemplate< Uart0 > | |
| static SingletonTemplate * | mpSingletonInstance |
Detailed Description
UART0 Interrupt Driven Driver This simply uses UartDev, and forwards the UART3 IRQ to UartDev::handleInterrupt() This enforces Singleton class, otherwise it's a thin wrapper around UartDev class.
Member Function Documentation
|
inlinestatic |
| bool Uart0::init | ( | unsigned int | baudRate, |
| int | rxQSize = 32, |
||
| int | txQSize = 64 |
||
| ) |
Initializes UART0 at the given
- Parameters
-
baudRate rxQSize The size of the receive queue (optional, defaults to 32) txQSize The size of the transmit queue (optional, defaults to 64)
|
inlinestatic |
Friends And Related Function Documentation
|
friend |
Friend class used for Singleton Template.
The documentation for this class was generated from the following files:
